近来在做一个关于Android中Camera的需求,此处做点简要记录。提供给大家参考,避免以后猜到这些坑。
Android中Camera主要分5.0以前还有5.0以后,从5.0开始Android支持Camera2,现在项目中这个模块只使用了Camera(你可以理解为Camera1)。
使用Camera基本的API我就不一一列举了,此处只讲经验积累的东西。下文将打开相机预览窗口称为Preview,拍照结果称为Picture。
旋转方向、图片大小
首先大多相机打开的方向并不是正常的,需要我们进行处理,你可能最终需要旋转度数为degree(90或180或270)。
Picture返回的照片也可能不是摆正的,需要旋转上面提到的度数degree.
我们可以获得Preview照片进行一些处理,比如二维码扫描或者ROI(感兴趣区域)识别,而Preview也是需要旋转degree角度才摆正.
使用相机时,你可以获得Preview和Picture可以支持的大小,但是你最好不要随便选择一个,首先,Preview的宽高比例需要接近你的UI中给相机预览窗口的宽高比,否则会觉得相机中图片被拉高了或者压扁了,你只需要做到比例接近就够了。另外无论是Preview的大小和Picture的大小,都需要考虑内存的情况。另外拍出来的照片大小取决于Picture的分辨率。
YUV格式
Preview回调的图片byte[]数组,是YUV存储格式的图片信息,我也是第一次见到这个概念,它和RGB一样是用于存储图片的编码格式,它需要通过某种公式转换成RGB,它的优点在于存储空间小,主要原因大概是几个Y 可以共享同一个UV.关于YUV的详细原理这里不拓展。然后如果你在项目中只拿Preview的图片,那么获取图片时有YuvImage相关的API可以使用。如果你是需要将图片信息传到JNI层进行图片处理,那么可能就需要进行进一步转换,转成RGB格式。而这里我遇到一个性能问题,工作中发现每一张Preview图片处理边缘识别时间特别慢,但是打出native层Opencv处理图片逻辑的耗时又并不是很长,最终发现是在Java层,使用YuvImage将YUV转RGB时相当耗时,基本就比得上native识别边缘的时间,最终发现可以在native层Opencv也有接口支持转YUV的格式,而且效率快很多,基本解决了在低端机器上的效率问题。
聚焦
聚焦,关于聚焦的问题,我们经常使用的方法就是设置一个FOCUS_MODE,然后调用camera.autofocus的方法并且获取聚焦结果的回调,但是需要注意一点的是,并非所有FOCUS_MODE都是可以支持camera.autofocus方法的,比如FOCUS_MODE_CONTINUOUS_VIDEO,所以设置几种FOCUS_MODE时最好看看相关注释。比如以下这段:
/**
* Continuous auto focus mode intended for video recording. The camera
* continuously tries to focus. This is the best choice for video
* recording because the focus changes smoothly . Applications still can
* call {@link #takePicture(Camera.ShutterCallback,
* Camera.PictureCallback, Camera.PictureCallback)} in this mode but the
* subject may not be in focus. Auto focus starts when the parameter is
* set.
*
* <p>Since API level 14, applications can call {@link
* #autoFocus(AutoFocusCallback)} in this mode. The focus callback will
* immediately return with a boolean that indicates whether the focus is
* sharp or not. The focus position is locked after autoFocus call. If
* applications want to resume the continuous focus, cancelAutoFocus
* must be called. Restarting the preview will not resume the continuous
* autofocus. To stop continuous focus, applications should change the
* focus mode to other modes.
*
* @see #FOCUS_MODE_CONTINUOUS_PICTURE**/
public static final String FOCUS_MODE_CONTINUOUS_VIDEO = "continuous-video";另外有一个小技巧,就是在调用拍照时,先调用camera.autoFocus然后在成功聚焦回调里拍照。当然,对于聚焦失败你应该设置最大的失败次数限制。
关于crash
camera.autofocus聚焦还有camera.takePicture这两个API都不能持续重复调用,否则会crash,执行完一次聚焦才能执行下一次聚焦,执行完一次拍照才能执行下一次拍照,所以你最好做一个保护,另外,根据官方文档解释,camera.takePicture返回拍照数据后,preview是自动被stop了的,所以你需要重新start一次,否则下次拍照会crash。然而,我发现在三星上拍完照preview并没有自动stop。
setFocusArea
另外关于setFocusArea,这个模块的概念在于理解其特殊的坐标系,见下图
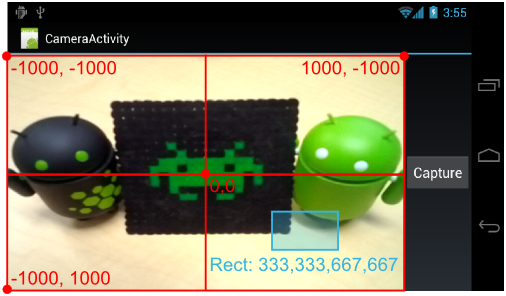
这幅图网上到处都有,其实是来自Android开发官网,官网如是解释:左上角永远是(-1000,-1000),右下角永远是(1000,1000),这个坐标系最开始看起来有点奇怪,但是仔细一看只是X坐标Y坐标都是偏移缩小了1000而已,另外将X坐标Y坐标的最大值缩放为2000的长度。
那么问题来了,按照上面所说,你的镜头旋转过了,那么你此处的坐标系是否也要旋转呢,答案是不需要,直接拿旋转后的视图计算即可。亲测有效。
关于camera的生命周期
这里主要关于什么时候释放相机资源的问题,涉及到切后台,锁屏的情况,具体可以参考QQ空间的这片技术文章,文章最后讲到了这一点。
主要技巧在于:SurfaceView设置INVISIBLE时会自动释放相机资源。
preview到picture的坐标转换
如果此时你的自定义相机有这样一个需求,在preview中某个坐标比如(100,100)处添加一个红点,那么,你如何在最终拍照的picture上同一个地方还原放上红点呢?而且可能此时你的preview分辨率是1080 * 1440,picture分辨率是3000 * 4000.
问题就在于如何在preview和picture之间做坐标转换,对于原生的Android系统相机,是比较好处理的,你可以参考这个Stackoverflow的回答
上面这个回答其中讲到,所有可选的preview和picture大小都是基于最大的 picture 而来, 而且是在Matrix.ScaleToFit.CENTER的规则上缩放而来,这种缩放的规则就是,小的分辨率往大的分辨率放大,小的分辨率至少会有宽或者高和大的分辨率贴合,只要宽或者高其中一者贴合即可,那么你就可以按照上面链接中讲到的方法进行坐标转换。
那么问题来了,在开发过程中,我遇到华为等机器上并不符合以上规则,也就是preview放大后,和最大的picture对比之下,宽和高都不贴合。这种情况就无法换算了。那么怎么解决这个问题呢?
最终解决方法是这样:在寻找preview和picture大小时,要求二者的宽/高比例相等,这样就可以解决坐标转换的问题了。
理解图片格式 YUV
可参考以下两篇文章
[http://www.cnblogs.com/azraelly/archive/2013/01/01/2841269.html
http://blog.csdn.net/beyond_cn/article/details/12998247
以下公式你可能得看上面的文章后才看得懂。
YUV的存储格式比较特别,一般都是多个Y公用UV,常见如下
I420: YYYYYYYY UU VV => YUV420P YV12: YYYYYYYY VV UU => YUV420P NV12: YYYYYYYY UVUV => YUV420SP NV21: YYYYYYYY VUVU => YUV420SP